MANIPULACE S MATERIÁLEM
MANIPULACE S MATERIÁLEM
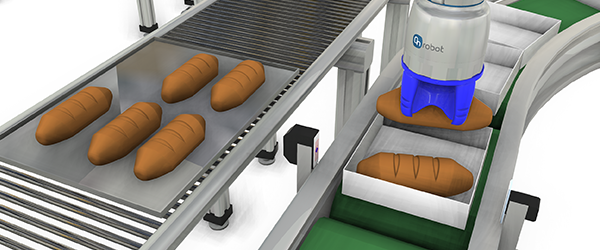
Jak vytvořit aplikaci Pick & Place

Jak vytvořit aplikaci pro paletování





")











OnRobot RG6 Aplikace Pick & Place na veletrhu…
Podívejte se na aplikaci Pick & Place, kterou jsme uvedli na veletrhu Automatica 2018

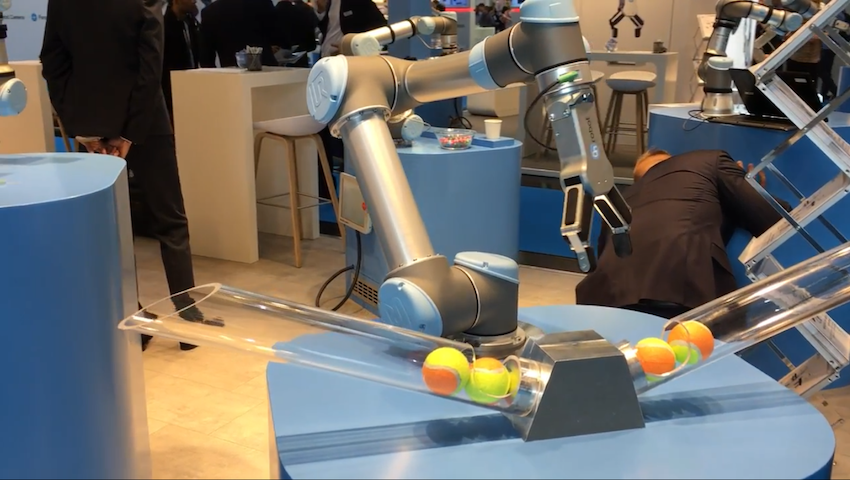
Stohování/odebírání se snímačem krouticího momentu…
Toto video ukazuje, jak pomocí aplikace OnRobot Stacking/Unstacking přesným způsobem stohovat a odebírat předměty. Toto řešení také pracuje s měkkými materiály, dokonce i se silami pod 10 Newtonů
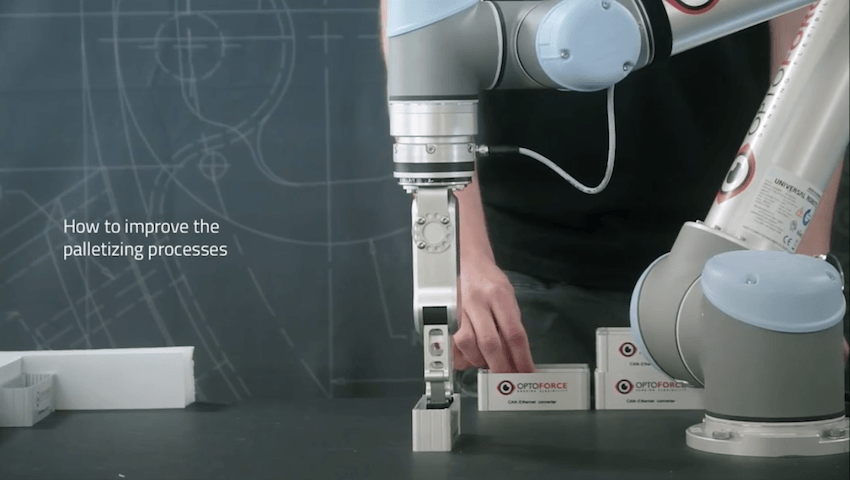
Paletizační aplikace OnRobot
Toto video ukazuje, jak pomocí řešení OnRobot Paletizing zlepšit paletizační procesy. Pomocí příkazu UR Palletizing a vyhledávací funkce OnRobot lze během paletizace provádět korekce.

RG2-FT inteligentní uchopovací aplikace na veletrhu…
Gecko Gripper používá stejný přilnavý systém pro uchycení jako nohy gekona, s miliony jemných vláken, které přilnou k povrchu dílu a vygenerují silné Van der Waalsovy síly.

Použití gripperu Gecko na veletrhu Automatica 2018
Gecko Gripper používá stejný přilnavý systém pro uchycení jako nohy gekona, s miliony jemných vláken, které přilnou k povrchu dílu a vygenerují silné Van der Waalsovy síly.

|
Jak rozvíjet podnikání pomocí kolaborativních aplikací
Díky rozkvětu chytřejších a přizpůsobivějších nástrojů mohou roboty nyní fungovat rychleji, přesněji a s větší silou, plnit celou řadu úkolů a zároveň maximalizovat návratnost investic. V naší elektronické brožuře získáte další informace o tom, jak zrychlit produkci při nižších nákladech.
|
|
