MANIPULATION DE MATÉRIAUX
MANIPULATION DE MATÉRIAUX
Comment concevoir une application de Pick & Place

Comment concevoir une application de palettisation


















Application de préhension intelligente RG2-FT à…
Le préhenseur Gecko utilise le même système adhésif que les pieds d’un gecko, avec des millions de fibres fines qui adhèrent à la surface de la pièce et génèrent de fortes forces van der Waals.

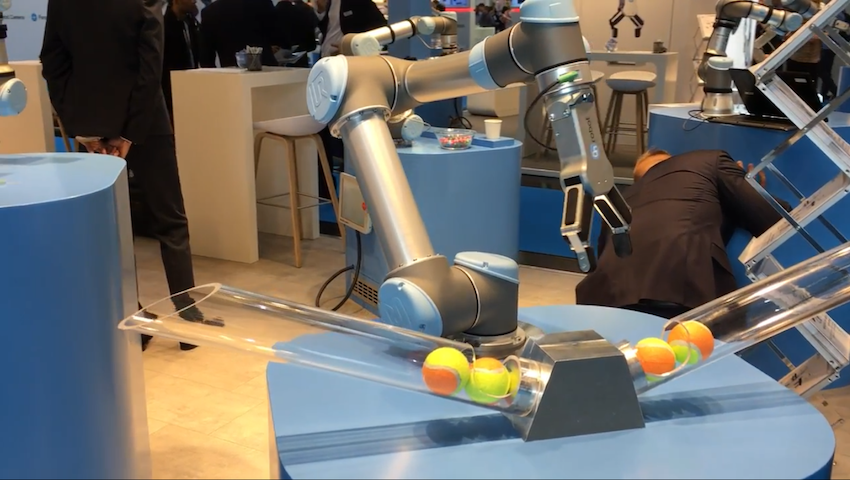
Application du Préhenseur Gecko à Automatica 2018
Le préhenseur Gecko utilise le même système adhésif que les pieds d’un gecko, avec des millions de fibres fines qui adhèrent à la surface de la pièce et génèrent de fortes forces van der Waals.
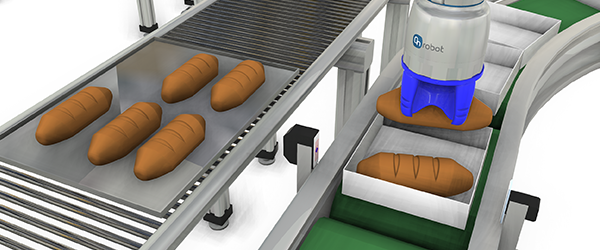
Application Pick & Place RG6 OnRobot à Automatica…
Découvrez l’application Pick & Place que nous avons présenté à Automatica 2018

Empilage / désempilage avec le capteur de couple de…
Cette vidéo montre comment empiler et désempiler des objets de façon précise à l’aide de l’application d’empilage/désempilage OnRobot. Cette solution fonctionne également avec de matériaux souples,…
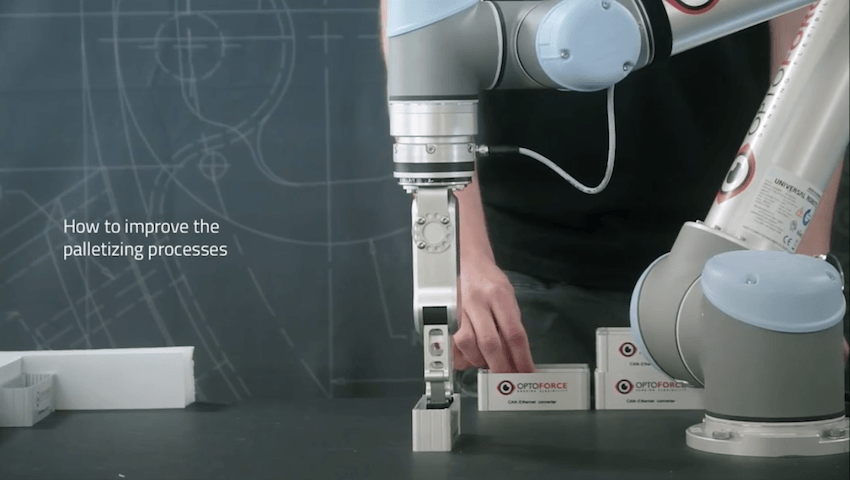
Application de palettisation OnRobot
Cette vidéo montre comment améliorer le processus de palettisation à l’aide de la solution de palettisation OnRobot. A l’aide de la commande UR Palettisation et de la fonction de recherche OnRobot,…

|
Comment faire croître votre entreprise grâce aux applications collaboratives
Avec l'avènement d'un outillage plus adaptatif et plus intelligent, les robots peuvent désormais fonctionner avec plus de vitesse, de force, de sécurité et de précision, accomplissant un large éventail de tâches tout en maximisant le RSI. Apprenez davantage sur la façon dont vous pouvez obtenir une production plus rapide à moindre coût en téléchargeant notre livre électronique gratuit.
|
|
