Robotic Surface Finishing – How Automation is Improving the Quality of Manufactured Products

There’s little doubt that robotic automation and other maturing technologies are revolutionizing manufacturing.
As the President of the International Federation of Robotics (IRF), Junji Tsuda, puts it:
“Industrial robots are a crucial part of the progress of manufacturing industry. Robots evolve with many cutting-edge technologies. They are vision recognition, skill learning, failure prediction utilizing AI, new concept of man-machine-collaboration plus easy programming and so on. They will help improve productivity of manufacturing and expand the field of robot application. The IFR outlook shows that in 2021 the annual number of robots supplied to factories around the world will reach about 630,000 units.”
The IFR World Robotics 2018 report also mentions several other trends, including the increasing ease with which robots can be integrated into manufacturing processes using plug and play technology. The report also mentions the growth of “cobots” or collaborative robots that work seamlessly alongside human workers.
This is all well and good, but what does that mean for the average manufacturing company?
An example of a manufacturing process that is already benefitting from intelligent automation is surface finishing.
End-of-Arm Tooling for Surface Finishing
End of Arm Tooling (EOAT) refers to the use of interchangeable tools that can quickly and easily connect to the end of a standard robotic arm. Common examples are grippers that can be used to pick and stack items or sensors to locate items or check physical properties.
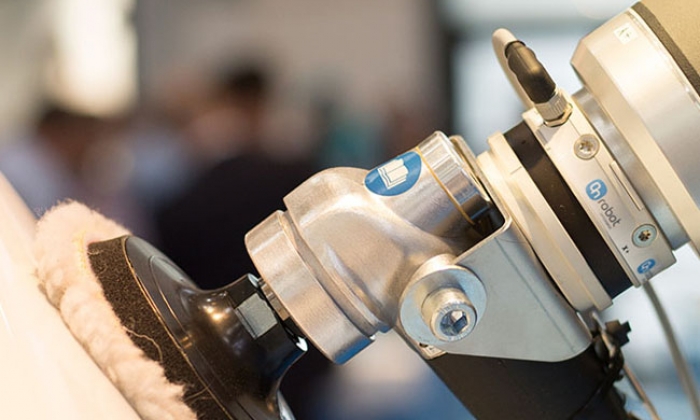
Surface finishing relies on a combination of an end-of-arm tool and sensor. Just as the finish of a hand-made product may depend on the expertise of a master-craftsman, so the quality of a robotically finished item relies on precision sensors and well-designed tools.
Well-designed and accurate end-of-arm tools are arguably more important than the robotic arm itself.
Precision Force Torque Sensors
OnRobot has developed a 6-axis Force Torque (F/T) Sensor that precisely measures both lateral forces and the torque in X,Y and Z directions.
Optical force sensor photodiodes are used to measure the amount of reflected light emitted by an LED. The measured values are compared, which leads to accurate force and torque measurements.
Precise force measurements are crucial for high-quality surface finishing. A constant force is applied to the surface of the item throughout finishing, which means that the finishing tool follows the surface contours.

Benefits of Force Torque Sensors for Surface Finishing
- Constant force – The force will be kept constant throughout the finishing process, unless the settings are changed.
- Avoid over or under-polishing – By adapting to the surface contours using the 6-axes, the sensor avoids applying too much or too little force.
- Manual path recording – The operator can set up a manual path for the robot to follow in minutes.
- Adapts to the environment – The sensor can find the orientation of the object and correct the tool orientation automatically.
- Detects collision – Avoids collision with surface protrusions or other tools.

Automated Surface Finishing Applications
There are numerous applications for accurate robotic surface finishing. Most manufacturing materials require surface finishing and robotic tools combined with 6-axis sensors are ideal for the job.
Applications include:
- Sanding and polishing furniture and other wooden items – Mass-produced wooden products often require shaping, sanding and polishing to get the required finish. Sanding tools can be fitted with various grades of sandpaper, as well as applying a fixed amount of force to make the item perfectly smooth.
- Polishing stainless steel parts – A slightly abrasive belt or spinning disc tool can be used to polish stainless steel items.
- Deburring after metal machining – A deburring end-of-arm tool can be used with the sensor, resulting in perfectly smooth edges.
- Grinding metal surfaces – Grinding wheels can be fitted to the sensor to apply the correct force to gently shape and smooth metal surfaces.
- Remove injection molding parting lines – The line where two halves of a plastic injection mold meet is known as the parting line. It often leaves a small protrusion that needs to be removed. The Force Torque sensor, combined with a gripper, can press the workpiece’s parting line against a polishing wheel, applying the perfect force to remove the protrusion without damaging the item.
- Polishing design items – Polymer or metal items can be polished to give a shiny finish, e.g. mobile phone casing.
Summary
Manufacturing companies are under pressure to find new and innovative ways to increase productivity, without compromising on quality. Automated surface finishing using end-of-arm tooling and a 6-axis sensor ticks both of these boxes. OnRobot provides a cost-effective way to achieve any desired surface finish, quickly and accurately.

|
Hogyan fejlessze vállalkozását együttműködő alkalmazásokkal
Az okosabb és adaptívabb eszközök eljövetelével a robotok mostanra nagyobb sebességgel, erővel, biztonsággal és pontossággal dolgozhatnak, és így feladatok széles körét képesek ellátni, miközben hamar behozzák árukat. Az eBook letöltésével többet is megtudhat arról, hogyan tud gyorsabb termelést elérni kevesebb kiadással.
SZEREZZE MEG AZ INGYENES eBOOK-OT
|
|
