What is end of arm tooling for robots?

If you have ever tapped into the subject of collaborative robotics, then you have most certainly encountered the terms “end of arm tooling” or “EoAT”.
EoAT – also known as end effectors - are crucial for unleashing the automation potential of collaborative robots. One could even say that there will be no automation advantages without at least one EoAT.
Though many might credit the robots solely for the optimization benefits without ever mentioning EoAT, it is in fact the EoAT that are the unsung heroes of process automation. In this article, we present the most common EoAT for collaborative robot arms.
Types of end of arm tooling for robots
There are many types of EoAT on the market. Below is a list of the most common types of EoAT for collaborative robots.
Grippers
Grippers are a very common type of EoAT. They are used for grasping objects and are especially suitable for assembly and pick and place applications.
- Mechanical grippers
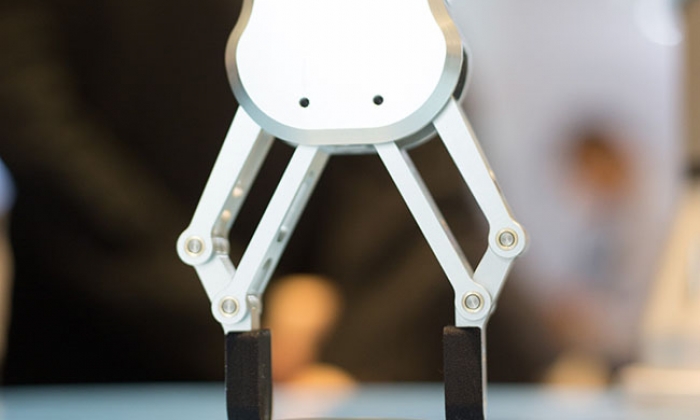
Mechanical grippers are grippers that use mechanical fingers to manipulate objects. Mechanical grippers have a distinctive design that is reminiscent of a crab’s pincers. Mechanical grippers usually come with adjustable force and stroke features, enabling them to perform tasks with human-like precision and dexterity.
The number of robot fingers vary depending on the model; however, most mechanical grippers have two to four fingers. The fingers are per default replaceable, allowing you to make the most of your investment. - Vacuum grippers
Vacuum grippers provide gripping through suction cups and are mostly used for handling workpieces with uneven surfaces or irregular shapes. Traditional vacuum grippers utilize external air supply systems which require high maintenance costs. Newer models run on electricity instead, eliminating the heavy costs in addition to improving the work environment due to producing less noise and dust. Our VG10 vacuum gripper falls into the latter category. - Adhesive grippers
These types of grippers grasp objects by sticking to them instead of holding them. Adhesive grippers are typically used to pick up light-weight objects, such as fabrics. However, the reliability of an adhesive gripper will diminish with each successful operation due the adhesive substance losing its quality. Our own Gecko gripper is also a type of adhesive gripper, but instead of relying on adhesive substances to achieve gripping power it utilizes the same forces that allow gecko lizards to climb surfaces effortlessly. This just shows how far robot technology has come since the first industrial robot started working in a General Motors assembly line in 1961.
Sensors
Sensors extend your automation possibilities as they provide your robot with a sense of touch. By attaching a sensor to your robot, you grant it the ability to work with fragile objects and perform delicate operations that would otherwise need the finesse of a human hand.
- Collision sensors
The purpose of this end effector type is to protect human workers as well as the robot itself from being damaged when the robot hits an obstruction during operation. In such cases, the collision sensor either shuts down the robot arm or it resets it to its original position to minimize further damage. - Force/torque sensors
Force/torque sensors provide accurate force and torque measurements, giving you full control of your robot’s movements and freedom to automate even the most complex processes. Some force/torque sensors also come with integrated collision control, eliminating the need for a separate collision sensor.
Tools
When it comes to tools as end effectors, the sky is the limit. However, in manufacturing companies, certain tools are more prevalent than others, e.g., shears, drills, welding torches, paint guns, deburring tools etc. Some choose to combine their tool with a sensor to gain optimal control of the production process.
Tool changers
Tool changer systems are designed to add flexibility to robotic automation processes by enabling robot operators to change tooling quickly and without hassle. A robotic tool changer facilitates easy and quick change of tools - with just a few clicks, you can, e.g., switch your welding gun out with a spray gun. Newer tool changers are designed to be lightweight as to not unnecessarily impact the payload of the robot arm. Some grippers have built-in tool changers.
As you can see, EoAT are crucial for optimizing processes. Although there is no doubt that robot arms are essential for achieving this goal, neither productivity nor quality will improve unless at least one end EoAT the picture. Thankfully, both robot arms and EoAT nowadays have accessible prices, meaning businesses of any size can get started with automation almost immediately.

|
Jak rozvíjet podnikání pomocí kolaborativních aplikací
Díky rozkvětu chytřejších a přizpůsobivějších nástrojů mohou roboty nyní fungovat rychleji, přesněji a s větší silou, plnit celou řadu úkolů a zároveň maximalizovat návratnost investic. V naší elektronické brožuře získáte další informace o tom, jak zrychlit produkci při nižších nákladech.
ZÍSKAT BEZPLATNOU ELEKTRONICKOU BROŽURU
|
|
