수년 동안 전동 그리퍼는 협동 로봇과 밀접하게 연관되어 왔습니다. 흔히 ‘코봇 액세서리’라는 틀에 갇혀 있는 반면, 기존 산업용 로봇은 완전히 다른 종류의 팔 끝 툴링(EOAT)이 필요한 것으로 간주됩니다.
그러나 이러한 구분은 코봇과 산업용 로봇의 경계가 모호해지는 것과 같은 속도로 무너지기 시작했습니다.
‘협동 로봇’과 ‘코봇’이라는 용어 대신 ‘협동 애플리케이션(collaborative applications)’이라는 용어를 사용한 최신 ISO 로봇 안전 표준에 이러한 발전이 잘 드러나고 있습니다.
이러한 현상은 공장 현장에서 나타나고 있으며, 사람들은 더 이상 “이 유형의 로봇에 가장 적합한 그리퍼는 무엇인가”라고 묻지 않습니다. 대신 애플리케이션 수준에서 시작합니다. 나아가 로봇의 유형에 구애받지 않고 전동 그리퍼가 애플리케이션에 부여하는 가치로 인해 전동 그리퍼의 선택 비중이 지속적으로 증가하고 있습니다. ISO 표준에서 인정했듯이 애플리케이션이 가장 중요하기 때문에 이는 긍정적인 추세라고 볼 수 있습니다.
산업용 로봇 사용자가 전동 그리퍼로 전환하는 이유
역사적으로 전동 그리퍼는 제한된 페이로드로 인해 뒤로 미뤄져 왔습니다. 초기 설계는 더 작고 가벼운 부품을 처리할 수 있도록 제작되었으며, 이는 자연스럽게 더 낮은 페이로드 로봇에 맞춰졌습니다. 그러나 이 가정은 더 이상 유효하지 않습니다.
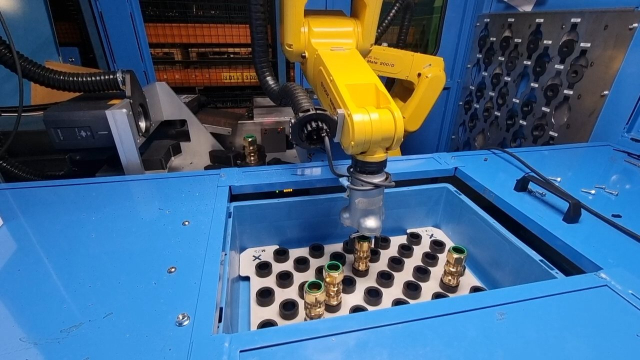
오늘날 전동 그리퍼는 25kg(55.11파운드) 모델을 포함하여 훨씬 더 높은 하중 등급의 제품을 사용할 수 있습니다. 또한 CNC 머신 텐딩 및 자재 취급과 같은 까다로운 산업 애플리케이션의 요구 사항을 충족하도록 설계된 듀얼 그리퍼 설정에 쉽게 배치할 수 있습니다.
동시에 사용자들은 전동 그리퍼의 적합성이 단순히 페이로드 기능에만 국한되지 않는다는 사실을 발견하고 있습니다. 내장된 유연성 덕분에 하나의 전동 그리퍼로 기계적인 전환 없이 더 다양한 크기의 부품을 처리할 수 있는 경우도 많습니다. 이는 통합업체와 최종 사용자에게 있어 시스템 설계를 간소화하고 전체 솔루션 비용을 절감할 수 있다는 장점을 제공합니다.
이 장점의 이유는 많은 전동 그리퍼에 적응성과 소프트웨어 기반 성능 조정을 지원하는 인텔리전스가 내장되어 있기 때문입니다. 전동 그리퍼는 종종 데이터 피드백, 위치 제어 및 기타 작업 데이터를 제공하여 자동화 성능을 간소화하는 데 사용할 수 있습니다.