80%。EsVata Shuttersはこれまで木製窓のシャッターの仕上げ加工を膨大な時間をかけて手動で行ってきましたが、ロボット研磨ツールの導入によって研磨時間が大幅に削減されました。この数字は、その割合です。
「もし木工に関わる人に聞けば、90%以上の人が最も面白くない作業の一つが研磨作業だと回答すると思います。その作業をロボットに任せることができるのは実に素晴らしいことです」と、EsVata Shuttersの創設者Paul Hsieh氏は述べています。
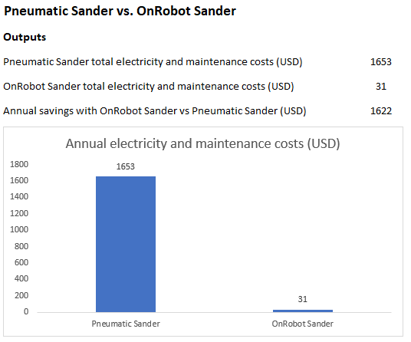
EsVataでは、これまでオービタルサンダーを使っていましたが、均一な仕上がりが得られませんでした。EsVata Shuttersは、OnRobot Sanderを導入したことで、作業時間の削減だけでなく、大幅な品質改善も実現しました。
「研磨時間が削減されましたが、品質は低下していません。品質は約20〜30%向上しました」とHsieh氏は言います。
EsVata Shutterの例が特別なわけではありません。多くの企業が、研磨、バフ研磨、艶出しの作業を自動化することで同様の成果を得ています。しかし、これらの作業には特有の問題が伴い、すべての研磨技術がエンドユーザーの要求や使いやすさの期待値を満たすとは限りません。
仕上げ作業は、形状、接触する研磨面の条件、力に左右されます。一貫した研磨軌道の制御ができないと、単純な研磨作業であっても廃棄部品ややり直しにつながることがあります。
予想以上に自動化が難しい研磨作業
研磨作業は、研磨ディスクを表面で動かすだけではありません。研磨は、絶えず調整が必要な力、接触する研磨面の角度、表面のばらつきによって異なります。
複雑な平面、曲面、または球状の表面の場合、接触する研磨面の条件は動きごとに変化します。関節軌道をプログラミングするだけでは、一貫した接触は実現できません。アクティブに力を制御できなければ、部品の小さな公差が予測できない結果につながります。
人間のオペレータは、接触面の感覚を手で感じ、その圧力や角度をリアルタイムで調整できます。その適応性を自動化に導入するには、単にあらかじめ定義した研磨軌道をたどるだけでなく、接触面を感知して対応するツールが必要になります。
これまで研磨作業を自動化する試みは行われてきましたが、その多くは十分な力のフィードバックがない、または高剛性の固定具に依存するシステムにより、結果的に不均一な仕上がりになったり、大量の手動による手直しが必要になったりしました。
信頼性の高い仕上げを実現する力の制御と再現性
一貫した表面品質は、力とトルクを繰り返し制御できるかどうかに左右されます。研磨を自動化する場合には、次の能力が重要です。
力を制御できる機能。研磨材が表面に適切な圧力で接触し、損傷を与えずに材料除去ができる。
トルクの安定性。さまざまな形状でも一貫した除去率を維持。
再現性。手作業による補正なしで、すべての部品が品質規格を満たすことができる。
EsVata Shuttersは、上記のOnRobot Sanderの機能を利用することで、人間による作業のばらつきを、一貫した力と研磨軌道の制御に置き換えることに成功し、その結果、予測可能な仕上がり品質を実現しました。