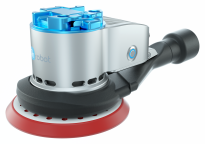
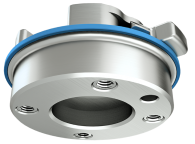
Den kraftige griperen 3FG25 er konstruert for å håndtere større og tyngre deler, og er ideell for CNC maskinell tending, materialhåndtering og monteringsoppgaver.
Slik gir du vekst til virksomheten med samarbeidsapplikasjoner
Takket være stadig smartere og mer fleksible verktøy kan roboter nå arbeide med høyere hastighet, styrke, sikkerhet og presisjon, og dermed håndtere en rekke oppgaver, samtidig som de maksimerer avkastningen på investeringene. Les mer om hvordan du kan øke produksjonshastigheten og senke kostnadene ved å laste ned vår eBok.