Pinza paralela de alta carga diseñada para aplicaciones de mantenimiento de máquinas CNC
Ver producto

Pinza paralela de fácil utilización para espacios estrechos y cargas exigentes
Ver producto

Pinza eléctrica versátil para paletizado y colocación de láminas antideslizantes
Ver producto

La pinza de alta resistencia 3FG25, diseñada para manejar piezas más grandes y pesadas, es ideal para tareas de descarga de tornos CNC, manejo de materiales y montaje.
Ver producto

Atornillador multifuncional con alimentador de tornillos
Ver producto

Elevador robótico de carga útil elevada para paletizado
Ver producto
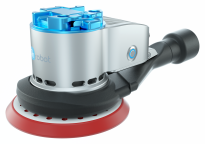
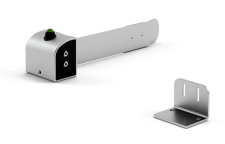
Acabado de superficies de forma rápida, sencilla, flexible y automatizada
Ver producto

Versátil pinza electromagnética para aplicaciones colaborativas seguras y precisas
Ver producto

Pinza neumática de vacío de alta capacidad, diseñada para aplicaciones robustas de paletizado.
Ver producto

Pinza Gecko adhesiva, compacta y para un agarre sin marcas
Ver producto

Pinza robótica flexible de 2 dedos y gran recorrido
Ver producto

Pinza robótica flexible de 2 puntas y de gran recorrido
Ver producto

Pinza Soft: pinza robótica flexible para uso alimentario
Ver producto

Agarre doble, más potencia para el doble de trabajo
Ver producto

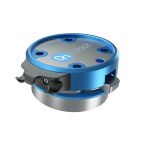
Sensor de fuerza/par HEX: aporta el sentido del tacto a tu robot
Ver producto

Pinza por vacío eléctrica, compacta y personalizable
Ver producto

Potente pinza por vacío eléctrica perfecta para el paletizado de cajas de cartón
Ver producto
Agarre dual flexible para más potencia y el doble de productividad
Ver producto