製品
エンドエフェクター
グリッパー
サンダー
スクリュードライバー
リフト
取り付け/ツール交換
センサー
付属品
全製品を見る
Off-The-Shelf Solutions
パレタイジングソリューション
CNCソリューション
すべての標準ソリューションを見る
ソフトウェア
パレタイジング
移送
CNC機械の搬送
パッケージング
すべてのD:PLOYソリューションを見る
アプリケーション
機械の搬送
パレタイジング
材料搬送
材料除去
品質
組立
リソース
導入事例
ブログ
Learn
ダウンロード
ソリューション
製品
OnRobotについて
会社概要
イベント
ニュース
販売代理店を探す
パートナーになる
採用情報
お問い合わせ
パートナーポータル
お問い合わせ
日本語
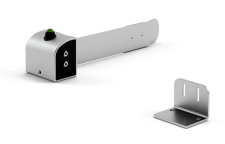
Quick changer
クイック OnRobot チェンジャー(5秒以内で変換できる素早いツール)
5秒以内で簡単かつ迅速に工具交換
迅速な再配置、ねじ止めなし、稼働時間の延長
すべてのOnRobot製品に統合
お問い合わせ
データシート
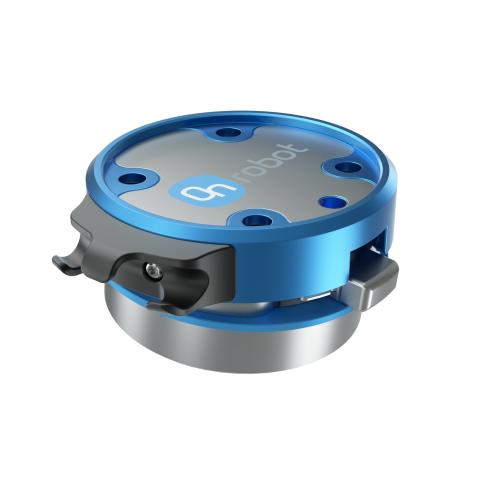
クイック OnRobot チェンジャー?
クイック OnRobot チェンジャーにより、ツールの簡単かつ迅速な変更が可能になります。クイック OnRobot チェンジャーは、25キロの積載量を取り扱え、低く軽いビルドインの高さを兼ね備えています。特許取得済みで信頼性が高く、使い勝手の良いより安全な施錠構造そして施錠ねじにより、クイック OnRobot チェンジャーはユニークな製品となり、すべての協働ロボット導入で理想的な存在となりました。クイック OnRobot チェンジャーを使うと、箱を開けるだけで必要なすべてが備わった、簡単かつ最速のツール チェンジャーを持つこととなります。
高いROI
5秒以内にツールを変更、高速展開
迅速なツール展開
冗長ロック機構により、ネジ止めなしで工具交換が可能
完全な互換性
すべてのOnRobotツールに統合
クイック OnRobot チェンジャーの利点と機能
クイック OnRobot チェンジャーは革新的なツールチェンジャーであり、市場最小かつ最軽量です。
使いやすいロックメカニズム、追加の安全ロック構造、ロックスプリングを備えた信頼性の高い特許を取得したクイック OnRobot チェンジャーは、すべての恊働ロボットアプリケーションに最適なユニークな製品です。
これは、ロボットにあらゆるアームの先端工具を適合させ、オペレーターがわずか数秒でアームの先端工具(EoAT)を変更できる世界で最も簡単で最速のツールチェンジャーです。
この製品は、入力フランジと出力フランジの両方がロボットフランジISO標準に完全に準拠しているため、ユニバーサルロボットおよび同じクラスの他のロボットに推奨されます。
Low weight
重量がわずか200g(7オンス)であるため、クイック OnRobot チェンジャーはロボットペイロードへの影響がわずかです。
Integrated in all OnRobot tools
主要な協調型および軽量のロボットタイプで、1つのOnRobotツールから別のツールに簡単に切り替えることができます。
ISO-9409-1 flange
ISO-9409-1フランジを備えたロボットアーム、ドローン、またはその他の機器で使用可能
No screwing required to attach a tool
冗長ロック機構により、ツールをねじることなく別のツールに切り替えることができます
Fully collaborative
使いやすく、費用対効果が高く、シャープなエッジがない
Up to 25 kg (55,11 lb) payload
小型、積載量最大25 kg
ご質問やご要望はございますか?
弊社までご連絡下さい!
お問い合わせ
ねじ締めアプリケーションの構築方法
この詳細なビデオガイドを使用して、ねじ締めアプリケーションの構築方法を説明します。アプリケーションの展開に必要なベストプラクティス、考慮事項、および主な技術的詳細についてお伝えします。
学習を開始する
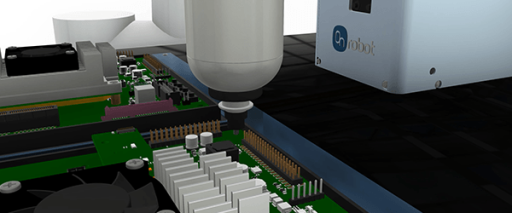
CNC マシンテンディングアプリケーションの構築方法
この詳細なビデオガイドでは、CNC マシンテンディングアプリケーションの構築方法を説明します。アプリケーションを正常に展開する上で必要なベストプラクティス、考慮事項、および主な技術的詳細について説明します。
学習を開始する
研磨アプリケーションの構築方法
この詳細なビデオガイドを使用して、研磨アプリケーションの構築方法を説明します。アプリケーションを正常に展開する上で必要なベストプラクティス、考慮事項、および主な技術詳細について説明します。
学習を開始する
プレスブレーキ マシンテンディングアプリケーションの構築方法
この詳細なビデオガイドでは、プレスブレーキ マシンテンディングアプリケーションの構築方法を説明します。アプリケーションを正常に展開する上で必要なベストプラクティス、考慮事項、および主な技術詳細について説明します。
学習を開始する
パレタイジングアプリケーションの構築方法
この詳細なビデオガイドで、パレタイジングアプリケーションの構築方法を学びましょう。アプリケーションを正常に展開する上で必要なベストプラクティス、考慮事項、および主な技術詳細について説明します。
学習を開始する
Pick & Placeアプリケーションの構築方法
この詳細なビデオガイドで、Pick & Placeアプリケーションの構築方法を学びましょう。アプリケーションを正常に展開する上で必要なベストプラクティス、考慮事項、および主な技術詳細について説明します。
学習を開始する
HEX力/トルクセンサーを使用したアプリケーション
材料除去
バリ取り、サンディング、研磨、バフ研磨、穿孔、フライス加工
アプリケーションを見る
品質
計測、テスト、検査
アプリケーションを見る
マシンテンディング
CNC、IMM、プレス
アプリケーションを見る
組立
挿入、取り付け、位置決め、ねじ締め、ナット締め
アプリケーションを見る
マテリアルハンドリング
運搬、仕分け、包装、パレタイジング
アプリケーションを見る
各種ロボットメーカーとの互換性
他の何かをお探しですか?
RG2 –幅広ストロークのフレキシブル2フィンガーロボットグリッパー
RG2 –幅広ストロークのフレキシブル2フィンガーロボットグリッパー
製品を見る
RG6-幅広ストロークのフレキシブル2フィンガーロボットグリッパー
RG6-幅広ストロークのフレキシブル2フィンガーロボットグリッパー
製品を見る
30KGの高積載量空気圧バキュームグリッパー
30KGの高積載量空気圧バキュームグリッパー
製品を見る
2FG14-CNCマシンテンディング・アプリケーション用に設計された、高積載量のパラレルグリッパー
2FG14-CNCマシンテンディング・アプリケーション用に設計された、高積載量のパラレルグリッパー
製品を見る
2FG7 - 狭い空間や要求の厳しい有効荷重に対応できる手軽なパラレルグリッパー
2FG7 - 狭い空間や要求の厳しい有効荷重に対応できる手軽なパラレルグリッパー
製品を見る
パレタイジングとシートパレット用の多様性のある電動グリッパー
パレタイジングとシートパレット用の多様性のある電動グリッパー
製品を見る
安全・正確な協働アプリケーションのための汎用性の高い電動磁気グリッパー
安全・正確な協働アプリケーションのための汎用性の高い電動磁気グリッパー
製品を見る
コンパクトで跡がつかないGECKOグリッパー
コンパクトで跡がつかないGECKOグリッパー
製品を見る
柔軟で大きなストロークの3指グリッパー
柔軟で大きなストロークの3指グリッパー
製品を見る
3FG25-頑丈な電動グリッパー
より大きく、重い部品を扱うように作られた頑丈なグリッパー、3FG25はCNCマシンテンディング、マテリアルハンドリング、組み立て作業には理想的です。
製品を見る
VG10-柔軟で調整可能な電気真空グリッパー
VG10-柔軟で調整可能な電気真空グリッパー
製品を見る
VGC10 – コンパクトで、カスタマイズ可能な電気バキュームグリッパー
VGC10 – コンパクトで、カスタマイズ可能な電気バキュームグリッパー
製品を見る
段ボール箱のパレタイジングに最適な強力電動真空グリッパー
段ボール箱のパレタイジングに最適な強力電動真空グリッパー
製品を見る
ソフトで柔軟性があり、食物用に認定
ソフトで柔軟性があり、食物用に認定
製品を見る
柔軟で適応可能な2.5Dビジョンシステム
柔軟で適応可能な2.5ビジョンシステム
製品を見る
ねじフィーダー搭載の多機能ロボットドライバー
ねじフィーダー搭載の多機能ロボットドライバー
製品を見る
高速で簡単、そして順応性の高い自動材料除去
高速で簡単、そして順応性の高い自動材料除去
製品を見る
HEX6軸力/トルクセンサー-ロボットにタッチの感覚を与える
HEX6軸力/トルクセンサー-ロボットにタッチの感覚を与える
製品を見る
パレタイジング用高荷重ロボットリフト
パレタイジング用高荷重ロボットリフト
製品を見る
デュアル クイック OnRobot チェンジャー-デュアルグリップ、2倍の作業能力
デュアル クイック OnRobot チェンジャー-デュアルグリップ、2倍の作業能力
製品を見る
Pallet Station
Pallet Station
製品を見る
デュアルマウンティングキット
柔軟なデュアルグリッピングで、より高い能力と生産性を実現
製品を見る
弊社製品のすべてをご覧になりますか?
弊社のパートナーネットワークに参加する。
弊社製品のすべてをご覧になりますか?
恊働アプリケーションでビジネスを成長させる方法
よりスマートで適応性の高いツールの登場により、ロボットはROIを最大化させながら、幅広いタスクを達成し、速度、強度、安全性、精度を向上させることができます。無料の電子書籍をダウンロードして、より低コストで高速な生産を可能にする方法の詳細をご確認下さい。
無料の電子ブックを入手
言語を選択
Americas
English
Português
Español
Asia
简体中文
繁体中文
日本語
한국어
ภาษาไทย
Tiếng Việt
Europe
English
Čeština
Dansk
Nederlands
Suomi
Français
Deutsch
Magyar
Italiano
Norsk
Polski
Português
Română
Español
Svenska
Türkçe
製品
エンドエフェクター
グリッパー
サンダー
スクリュードライバー
リフト
取り付け/ツール交換
センサー
付属品
全製品を見る
Off-The-Shelf Solutions
パレタイジングソリューション
CNCソリューション
すべての標準ソリューションを見る
ソフトウェア
パレタイジング
移送
CNC機械の搬送
パッケージング
すべてのD:PLOYソリューションを見る
アプリケーション
機械の搬送
パレタイジング
材料搬送
材料除去
品質
組立
リソース
導入事例
ブログ
Learn
ダウンロード
ソリューション
製品
OnRobotについて
会社概要
イベント
ニュース
販売代理店を探す
パートナーになる
採用情報
お問い合わせ
日本語