Pinza parallela per carico utile elevato progettata per applicazioni di manutenzione delle macchine CNC
Vedi prodotto

Pinza parallela senza problemi per spazi ristretti e payload impegnativi
Vedi prodotto

Pinza elettrica versatile per la pallettizzazione e l'uso di fogli di scorrimento
Vedi prodotto

Costruita per movimentare parti più grandi e pesanti, la pinza per impieghi gravosi 3FG25 è ideale per le attività di manutenzione delle macchine CNC, movimentazione di materiali e assemblaggio.
Vedi prodotto

Avvitatore robot multifunzione con alimentatore di viti
Vedi prodotto
Presa doppia flessibile per maggiore potenza e produttività raddoppiata
Vedi prodotto

Ascensore robotizzato ad alto carico per la pallettizzazione
Vedi prodotto

Versatile pinza magnetica elettrica per applicazioni collaborative sicure e precise
Vedi prodotto

Pinza pneumatica a vuoto ad alto carico utile da 30 kg
Vedi prodotto
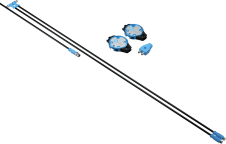
Rapida sostituzione degli strumenti entro 5 secondi
Vedi prodotto
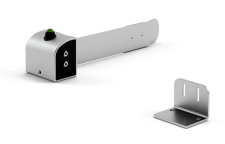
Rimozione del materiale automatica, veloce, facile e flessibile
Vedi prodotto

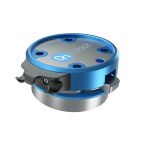
Sensore di forza/coppia HEX: per dare il senso del tatto al tuo robot
Vedi prodotto

Pinza a vuoto elettrica compatta e personalizzabile
Vedi prodotto

Potente pinza a vuoto elettrica ideale per la pallettizzazione di scatole di cartone
Vedi prodotto